by Greg Siddall
Introduction:
The VITALS (Ventilation, Interactions and Transports Across the Labrador Sea) research network is funded to study how the deep ocean exchanges carbon dioxide, oxygen, and heat with the atmosphere through the Labrador Sea. To address this topic, a multi-instrumented, deep-ocean mooring has been deployed to measure and collect oceanographic parameters in the Labrador Sea.
The mooring contains a surface-profiling “SeaCycler” at its top, with 9 x MicroCAT CTD’s and two RDI ADCP’s below it. SeaCycler is ideally suited for VITALS research due to its unique ability to profile the upper ocean making numerous simultaneous measurements near the surface.
The deployment was very successful and early engineering results are encouraging.
At the time of writing, SeaCycler has completed:
- 12 profiles to the surface from a parking depth of 154m,
- Is moored in 3526m of water located mid-way between Greenland and Newfoundland, Canada,
- Has sent 72 data files to shore,
- and has profiled a total vertical distance of 3.3 km underwater.
Unless new commands are sent, the system is programmed to profile every 20 hours for the next year.
The average water temperature in the upper 150m is currently 3.9 °C.
SeaCycler – A Short Description:
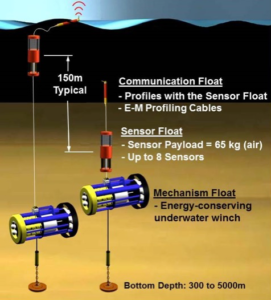
SeaCycler is a moored, deep-ocean, surface-piercing profiler with two-way satellite communication. This means it’s anchored to the sea floor and cycles (or “profiles”) oceanographic sensors through the upper 150m of the ocean collecting measurements on the way (see Fig 1).
At the top of the profile, it surfaces a satellite telemetry system to transfer data to shore and receive new commands. After communication, it returns its profiling elements to a depth resistant to bio-fouling and safe from surface hazards such as ships and storm waves.
Primary to SeaCycler’s success is its ability to profile a sizable sensor suite (currently 11 sensors) using substantial buoyancy to resist mooring knock-over from ocean currents while conserving battery-stored energy to permit over 500 x 150m profiles throughout year-long deployments.
SeaCycler senses surface conditions and will abort profiles prematurely if wave loading exceeds an adjustable limit. Profiling movement is controlled by a unique drive system which powers an underwater winch that has built-in compliance and no rotating seals or slip-rings to enhance reliability.
Deployment Description:
The weather was good with light winds and 1 to 2m waves. We started early in the day as winds were forecasted to pick up. A quick site survey revealed flat bathymetry and good water depths.
SeaCycler components were deployed in the usual “MechFloat-tow, CommFloat, SensorFloat, MechFloat-slip” fashion (B-L of Fig 2), which worked well.
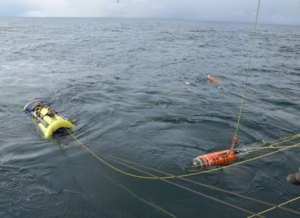


The buy ativan online A-Frame was used to deploy most mooring components including the MechFloat. The CommFloat was slipped by hand and a slewing crane deployed the anchors.
A capstan winch was used to pay out cable and deck cleats were used to slip mooring loads.
The deployment took less time than expected and resulted in an estimated 3-hour tow to achieve station. It was decided to omit 1 x 5m length of chain and deploy immediately to avoid the long tow. The final mooring location was about 2 nm further from the AR7W line than originally planned.
The ship was maneuvered to follow the mooring’s top floats until they submerged. A nice gentle tow was observed. No mooring beacon hits were received after submergence.

Hydro-acoustic triangulation was not performed at this time and instead, the ship was relocated for K1 deployment. The ship returned to the SeaCycler site later that evening, but triangulation was not performed since a SeaCycler surfacing had already occurred providing a more accurate GPS location fix.
Mooring Position & Anchor Fall-Back:
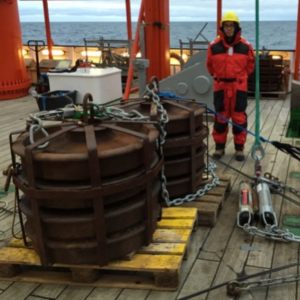
The 2400kg double-quad steel anchor was slipped in 3526m of water and eventually settled on the bottom 1016m to the South-East. It took 38 minutes for the top of the mooring to submerge after anchor release. This equates to a SeaCycler descent rate of .48 m/s, which is well within acceptable limits.
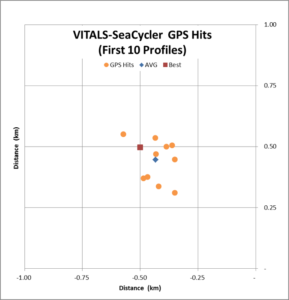
The final mooring position is determined by averaging CommFloat GPS location fixes shown in Figure 4. The central “Best” point indicates the profile with least amount of “Extra Cable Out”.
Acknowledgements:
The entire SeaCycler Team at Dalhousie University and Scripps Institution of Oceanography would like to thank the Maria S. Merian’s Captain Ralf Schmidt for his support and excellent ship handling skills and our Chief Scientist, Dr. Johannes Karstensen from GEOMAR-Kiel for his support and acceptance of our operation into his OSNAP West project. We also acknowledge the support of the VITALS project of the Natural Sciences and Engineering Research Council of Canada (NSERC) and the Canada Excellence Research Chair in Ocean Science and Technology for supporting this deployment.
Many thanks are also given to Christian Begler, Gerd Niehus and Uwe Papenburg for their valuable advice and help on deck and to the many students and ship’s crew for their excellent mooring handling skills and provision of delicious food.
It was a pleasure to meet and work with the entire MSM54 team. We sincerely thank you for your help and assistance and opportunity to sail together.
New SeaCycler data is reported daily Here