By Amy Bower
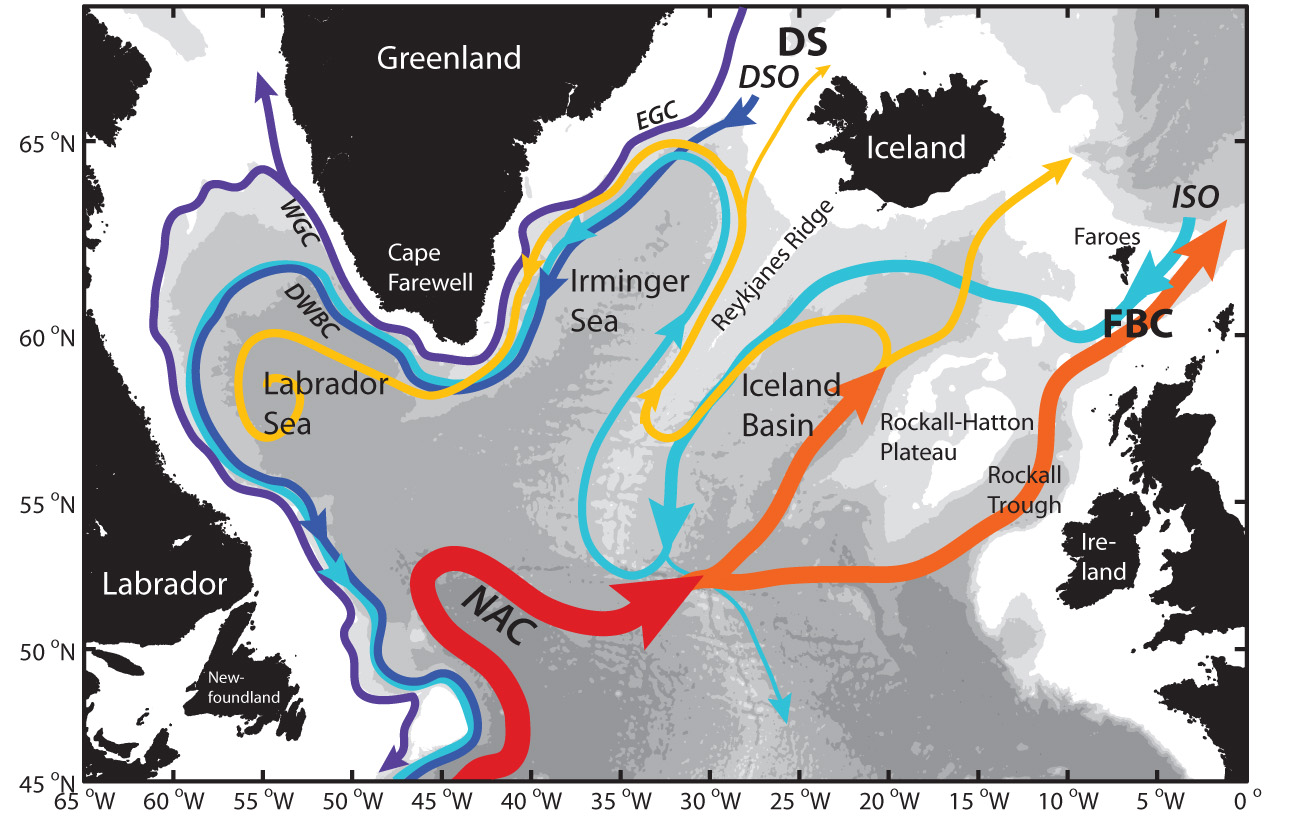
As described in earlier posts, the purpose of OSNAP is to quantify the ocean’s role in redistributing heat and fresh water between low and high latitudes in the North Atlantic. The “overturnin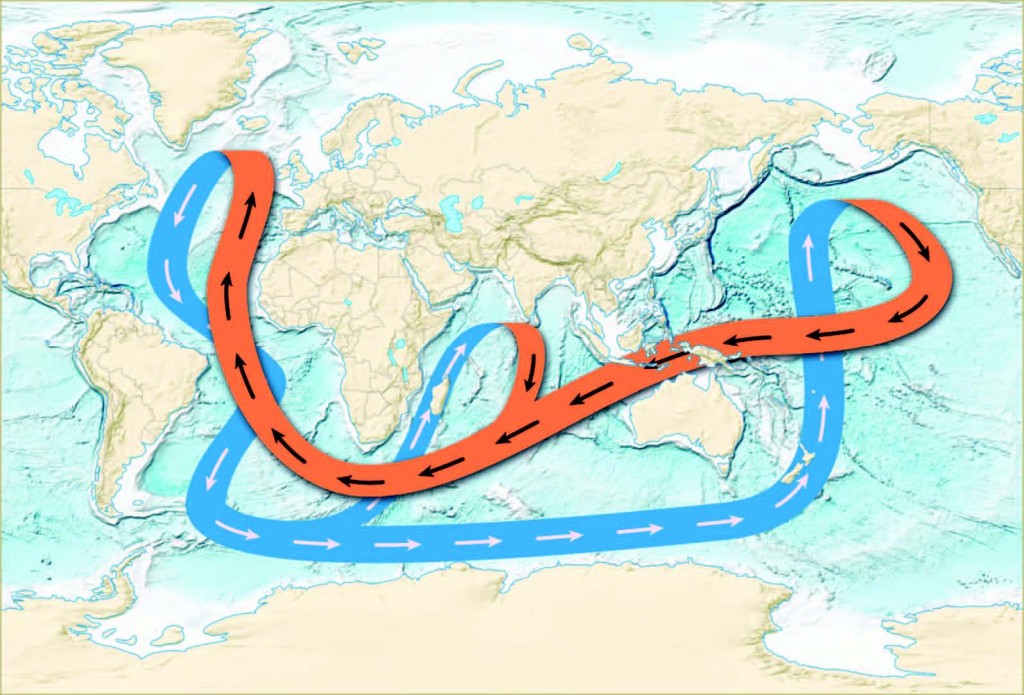 g circulation” refers to the generally northward flow of warm and salty water in the upper ocean, and the southward return of colder, fresher water deeper down. The system of ocean currents that makes up the overturning circulation has been efficiently depicted in various schematic diagrams and is often referred to as the Great Ocean Conveyor. It is important however not to interpret this schematic as exactly representative of the deep and shallow currents in the North Atlantic. A more realistic view is shown by the second diagram below, but even this suggests overly smooth and well-behaved current pathways.
g circulation” refers to the generally northward flow of warm and salty water in the upper ocean, and the southward return of colder, fresher water deeper down. The system of ocean currents that makes up the overturning circulation has been efficiently depicted in various schematic diagrams and is often referred to as the Great Ocean Conveyor. It is important however not to interpret this schematic as exactly representative of the deep and shallow currents in the North Atlantic. A more realistic view is shown by the second diagram below, but even this suggests overly smooth and well-behaved current pathways.
As a complement to measurements of temperature, salinity and currents at fixed locations along the OSNAP line, OSNAP co-PI Susan Lozier and I will be releasing a total of 120 freely drifting floats into the deepest currents in the subpolar North Atlantic to document the real pathways of these slow but relentless “rivers” of near-freezing water flowing along the bottom of the ocean.
So how do we track the pathways of currents two miles deep? We take advantage of the fact that sound travels exceptionally long distances in the ocean. The first step we are taking is to moor 10 sound beacons throughout the subpolar region where we plan to release the floats. A map of the beacon locations is shown below. Each beacon is anchored to the sea floor in such a way that it is suspended in the water about 1200 meters down from the surface. At a precise time each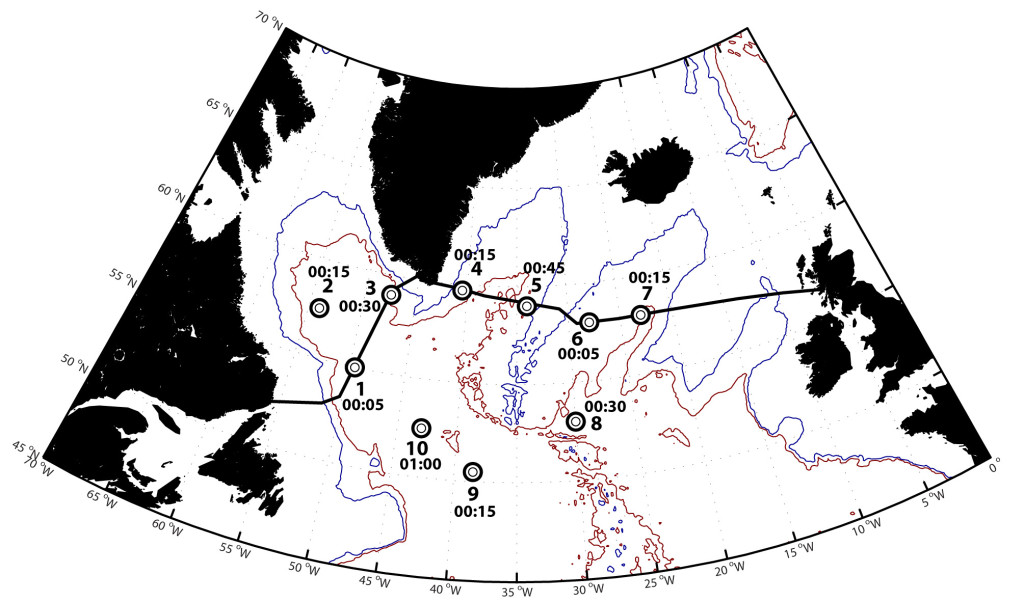 day, the beacons emit an 80-second tone at about 260 Hz. Then we release floats from the research vessel at various locations where we know the currents are located. The floats have just the right weight (measured within 1 gram) to sink and drift 200 meters above the sea floor. Attached to each float is an underwater microphone, called a hydrophone. The floats will listen for the beacons and record the time that they hear the sound signals. They will do this for two years, then drop some weight so they can rise to the sea surface and transmit the recorded information to us via satellite. Knowing the time the signal was sent, and each time it reached the float and the speed of sound in seawater, we can figure out the distance between the float and each sound beacon. As long as the float hears signals from at least two beacons, we can figure out where the float was every day. By connecting the dots from day to day, we end up with the float’s trajectory and the path of the water it was drifting with. With many floats, we can generate a description of where the currents go most frequently. We can also observe meanders and eddies in the currents.
day, the beacons emit an 80-second tone at about 260 Hz. Then we release floats from the research vessel at various locations where we know the currents are located. The floats have just the right weight (measured within 1 gram) to sink and drift 200 meters above the sea floor. Attached to each float is an underwater microphone, called a hydrophone. The floats will listen for the beacons and record the time that they hear the sound signals. They will do this for two years, then drop some weight so they can rise to the sea surface and transmit the recorded information to us via satellite. Knowing the time the signal was sent, and each time it reached the float and the speed of sound in seawater, we can figure out the distance between the float and each sound beacon. As long as the float hears signals from at least two beacons, we can figure out where the float was every day. By connecting the dots from day to day, we end up with the float’s trajectory and the path of the water it was drifting with. With many floats, we can generate a description of where the currents go most frequently. We can also observe meanders and eddies in the currents.
On the first leg of the R/V Knorr’s OSNAP voyage, three of the beacons (8-10 in the map above) and 10 of the floats were deployed. Some test floats released at the same time have already surfaced and let us know that those three beacons are working properly. Our first success! Yesterday, we anchored sound beacon #5 in the Irminger Basin, west of the Reykjanes Ridge (see photos below). Next week we will moor #6 and #7, and release 10 floats east of the Reykjanes Ridge. Altogether it will take four research cruises on two different vessels to get all 10 beacons and 40 floats in the water this summer. We plan to rlease 40 more floats each in the summers of 2015 and 2016. It’s “Bon Voyage” to each one as it goes off for a tour of the deep currents of the North Atlantic.
[portfolio_slideshow id=339]